
I am currently a Postdoctoral Fellow working with Stefan Weiss at the Control of Networked Systems, Austria. I obtained my Ph.D. in Computer Science at the University of Klagenfurt, Austria. Prior to this, I completed both a B.Sc. and an M.Sc. in Hardware Software Design and Embeeded Systems Design at the Univeristy of Applied Sciences Hagenberg, Austria.
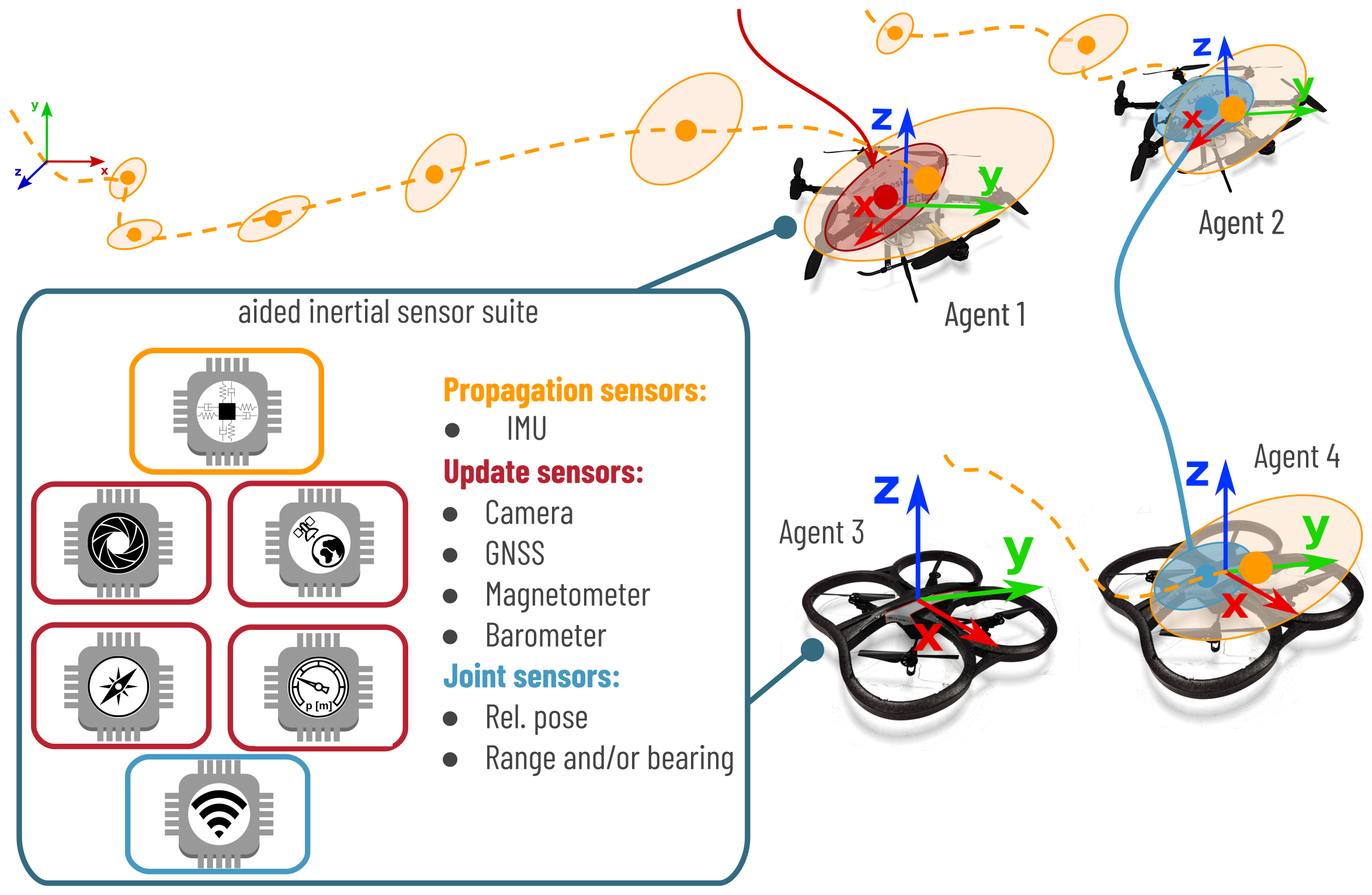
My research is primarily concerned with robust localization in swarms of heterogeneous mobile agents with multiple and time-varying sensing modalities focusing on the design, modeling, simulation and evaluation. In my Ph.D. thesis, supervised by Stefan Weiss, we investigate the issue of robust localization in swarms of heterogeneous mobile agents with multiple and time-varying sensing modalities. Our focus is the development of filter-based and decoupled estimators under the assumption that agents possess communication and processing capabilities. My interest originates from my stay at the Austrian Institute of Technology (AIT) with the Vision, Automation, and Control department, where I worked, e.g., on a real-time stereo matching algorithm (CUDA) for an embedded GPU accelerated platform, an a drive assistant system that detects obstacle behind a wheel loader, and on mobile visual SLAM algorithm. My interests are Ultra-wideband Inertial Navigation, Collaborative and Modular State Estimation, Computer Vision, Embedded Autonomous Systems and Robotics.
Postdoctoral Fellow
Control of Networked Systems
University of Klagenfurt
Austria
Selected Research Projects

An alternative mutual perception system was evaluated in a collaboration with the Technical University of Prague. This led to the integration and evaluation of the UVDAR system (visual mutual perception utilizing blinking UV-LEDs). While UVDAR provided 6-DoF relative position and orientation estimates, its use for relative localization within ROMING was limited.
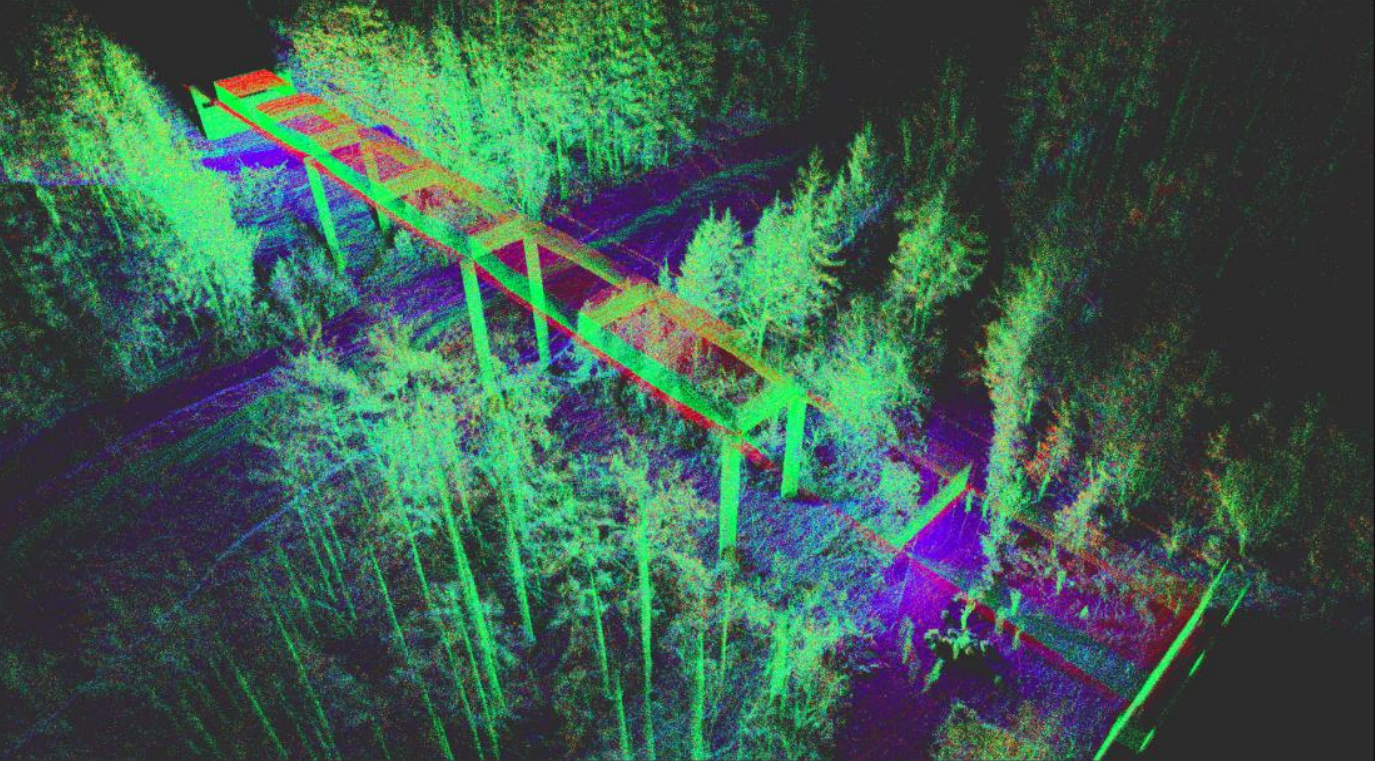
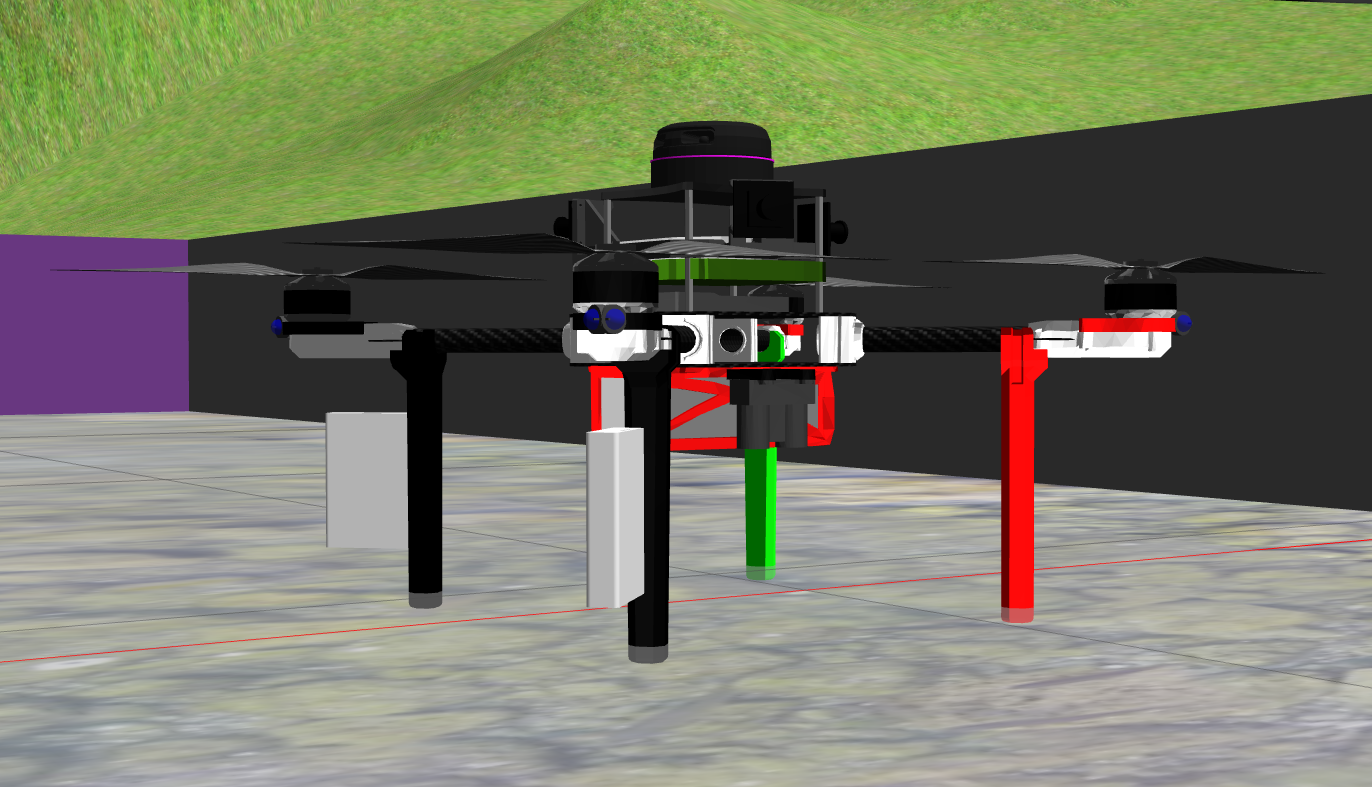
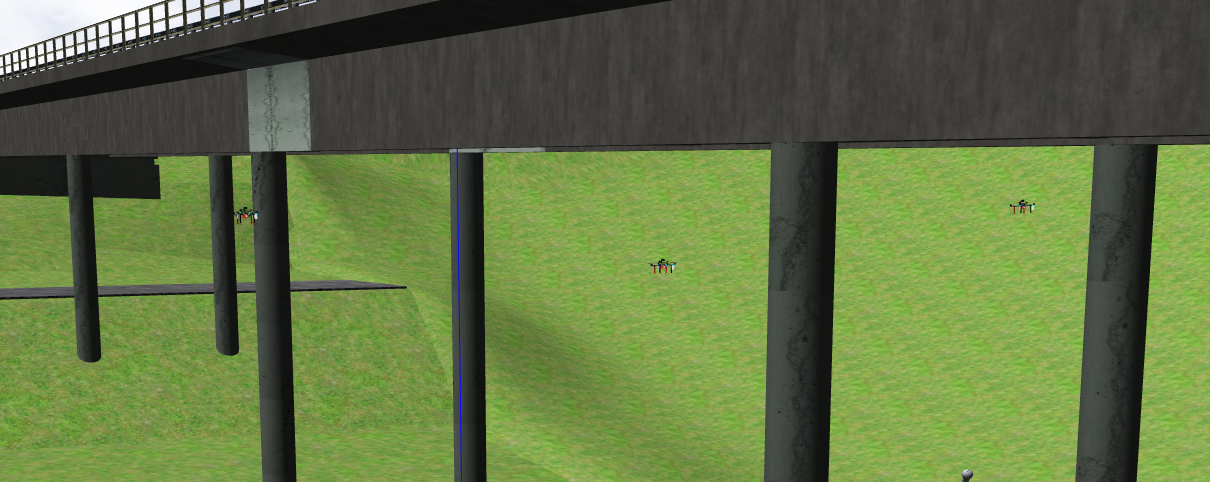
A dataset was recorded for the UVDAR evaluation, revealing inconsistencies and limitations in dynamic scenarios. The UVDAR system was found unsuitable for the project’s localization requirements. Therefore, a novel UWB ranging protocol was developed. The initial meshed UWB protocol’s limitations prompted the development of a dynamic TDMA-based double-sided two-way ranging (DS-TWR) protocol and a custom firmware for Qorvo DMW1001 modules was implemented, and antenna delay and anchor position calibration methods were investigated. The 3D BIM generation workflow utilizing LiDAR point clouds for 3D model reconstruction was evaluated using the realistic Gazebo simulation environment. Ring segments were recorded in simulation, and mesh extraction yielded accurate results. A dataset was recorded at the Kleindürrenbachbrücke using 4 UAVs with LiDAR and UWB sensors.
Selected Publications
Roland Jung;
University of Klagenfurt, 2023
-
Isolated Kalman filtering: theory and decoupled estimator design
R. Jung; L. Luft; S. Weiss;
Springer's Autonomous Robots (Journal), 2025 -
Swarming Without an Anchor (SWA): Robot Swarms Adapt Better to Localization Dropouts Than a Single Robot
J. Horyna; R. Jung; S. Weiss; E. Ferrante; M. Saska
IEEE Robotics and Automation Letters (IEEE Journals), 2025 -
CNS Flight Stack for Reproducible, Customizable, and Fully Autonomous Applications
M. Scheiber; A. Fornasier; R. Jung; C. Böhm; R. Dhakate; C. Stewart; J. Steinbrener; S. Weiss; C. Brommer
IEEE Robotics and Automation Letters (IEEE Journals), 2022 -
Modular Multi-Sensor Fusion: A Collaborative State Estimation Perspective
R. Jung; S. Weiss
IEEE Robotics and Automation Letters (IEEE Journals), 2021 -
Edge Computing in 5G for Drone Navigation: What to Offload?
S. Hayat; R. Jung; H. Hellwagner; C. Bettstetter; D. Emini; D. Schnieders
IEEE Robotics and Automation Letters (IEEE Journals), 2021 -
MaRS: A Modular and Robust Sensor-Fusion Framework
C. Brommer; R. Jung; J. Steinbrener; S. Weiss
IEEE Robotics and Automation Letters (IEEE Journals), 2021
-
Real-Time Initialization of Unknown Anchors for UWB-aided Navigation
Giulio Delama; Igor Borowski; Roland Jung; Stephan Weiss
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2025 -
A Framework for the Consistency Analysis of Relative Pose Sensors for Unmanned Aerial Vehicles (Uavs)
R. Jung; J. Horyna; T. Jantos; S. Martin; S. Weiss
2025 International Conference on Unmanned Aircraft Systems (ICUAS) (IEEE Conferences), 2025 -
Modular Meshed Ultra-Wideband Aided Inertial Navigation with Robust Anchor Calibration
R. Jung; L. Santoro; D. Brunelli; D. Fontanelli; S. Weiss
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2024 -
Radar-Inertial Odometry for Closed-Loop Control of Resource-Constrained Aerial Platforms
J. Michalczyk; M. Scheiber; R. Jung; S. Weiss
2023 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) (IEEE Conferences), 2023 -
Multi-State Tightly-Coupled EKF-Based Radar-Inertial Odometry With Persistent Landmarks
J. Michalczyk; R. Jung; C. Brommer; S. Weiss
2023 IEEE International Conference on Robotics and Automation (ICRA) (IEEE Conferences), 2023 -
Scalable and Modular Ultra-Wideband Aided Inertial Navigation
R. Jung; S. Weiss
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2022 -
Tightly-Coupled EKF-Based Radar-Inertial Odometry
J. Michalczyk; R. Jung; S. Weiss
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2022 -
Centralized-Equivalent Pairwise Estimation with Asynchronous Communication Constraints for two Robots
E. Allak; A. Barrau; R. Jung; J. Steinbrener; S. Weiss
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2022 -
Scalable Recursive Distributed Collaborative State Estimation for Aided Inertial Navigation
R. Jung; S. Weiss
2021 IEEE International Conference on Robotics and Automation (ICRA) (IEEE Conferences), 2021 -
VINSEval: Evaluation Framework for Unified Testing of Consistency and Robustness of Visual-Inertial Navigation System Algorithms
A. Fornasier; M. Scheiber; A. Hardt-Stremayr; R. Jung; S. Weiss
2021 IEEE International Conference on Robotics and Automation (ICRA) (IEEE Conferences), 2021 -
Decentralized Collaborative State Estimation for Aided Inertial Navigation
R. Jung; C. Brommer; S. Weiss
2020 IEEE International Conference on Robotics and Automation (ICRA) (IEEE Conferences), 2020 -
Covariance Pre-Integration for Delayed Measurements in Multi-Sensor Fusion
E. Allak; R. Jung; S. Weiss
2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Conferences), 2019
-
Distributed Collaborative State Estimation: Joint Observations for Reliable Autonomous Navigation in Swarms
R. Jung; S. Weiss
Proceedings of the Austrian Robotics Workshop 2021, 2021 -
Vision-based Autonomous Feeding Robot
Schörghuber M.; Wallner M.; Jung R.; Humenberger M.; Gelautz M.
Proceedings of the OAGM Workshop 2018 Medical Image Analysis, 2018
-
AAU Multi-Agent UVDAR Dataset
Jung Roland; Horyna Jiří; Saska Martin; Weiss Stephan
Zenodo, 2024 -
AAU Mehsed UWB Dataset
Jung Roland; Santoro Luca; Fontanelli Daniele; Brunelli Davide; Weiss Stephan
Zenodo, 2024 -
AAU synthetic ROS dataset for VIO
Roland Jung, Gernot Rischner, Eren Allak, Alexander Hardt-Stremayr, Stephan Weiss
Zenodo, 2020
Selected Videos
Selected Frameworks and Tools
Working Experience
Junior Scientis at AIT, 03/2015–11/2017My responsibiliets were the implemenation and porting of an real-time capable stereo vision algorithm in CUDA for the NVIDIA Jetson Tegra TK1 platform. Based on that, I developed an assisting system aimed for a wheel loader, that identifies and tracks obstacles (humans) in the rear of the vehicle. I served in different other projects, e.g., in a visual airplain tracking and intersection detection pipeline. In my last project we were developing a mobile Visual-SLAM algorthim (IPhone 7) for indoor localization and relocalization based on pretrained envirnment through server-client architecture in cooperation with Insider Navigation.
Summer Research Assistant at B&R, 03/2013–09/2013
My main focus was porting, evaluating the openPOWERLINK Stack on new FPGA development Kits, such as the Terasic DE1-SoC Development Kit.